ระบบจอมองรอบ 360 องศา (360 ระบบ AVM)
คนขับรถมักพบกับปัญหาเหล่านี้: เมื่อขับรถผ่านเส้นทางแคบ มันยากที่จะประเมินระยะที่ปลอดภัยสําหรับการผ่านระยะทางการมองเห็นจากกระจกรถยนต์จํากัดมาก, แม้แต่รถที่มีกล้องมองหลังที่ติดตั้ง, ยังมีจุดตาบอดกับภาพมองหลัง; เมื่อย้อนหลัง, บางอุปสรรคเล็กและต่ํายากที่จะเห็นผ่านกระจกมองหลัง,หรือตรวจพบด้วยราดาร์รถ...

ระบบ 360 องศา รอบ ๆ View Monitor System ((360 AVM System) จะช่วยแก้ปัญหาเหล่านี้เพื่อหลีกเลี่ยงการชนกัน.
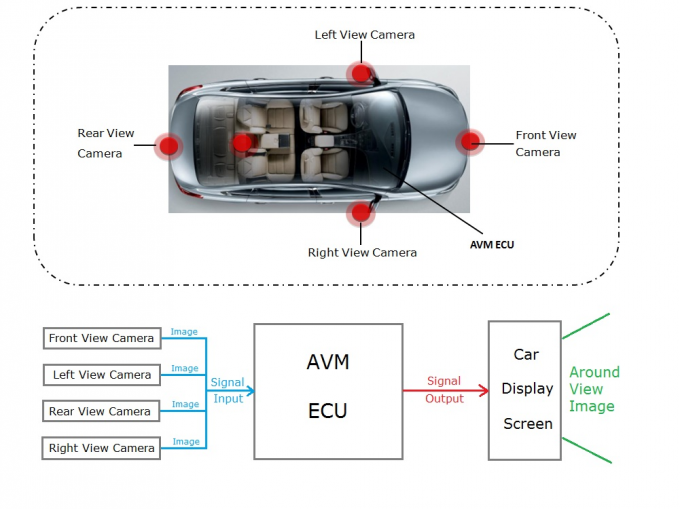
ระบบจอ 360 องศารอบ ๆ ((360 AVM System) ประกอบด้วยหน่วยควบคุมอิเล็กทรอนิกส์ (ECU) และกล้องสี่ตัว ECU จะประมวลผลภาพที่บันทึกโดยสี่กล้อง และจากนั้นออกไปยังหน้าจอจอรถ
ฟังก์ชันพื้นฐานของระบบ 360 AVM
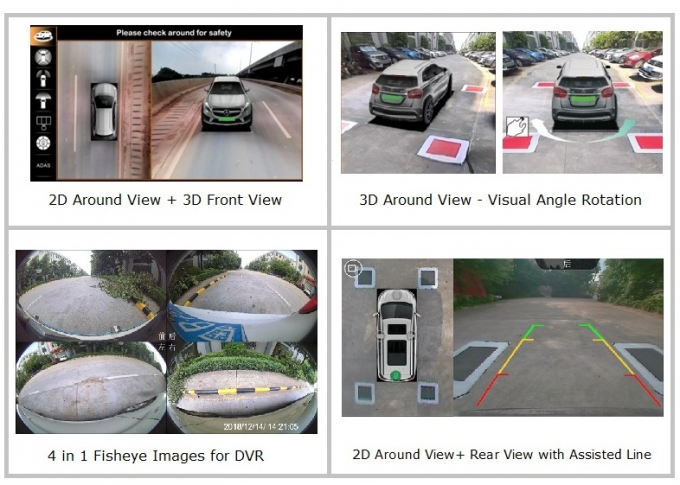
ฉัน2D Around View ((Range: หน้าและหลัง>3 เมตร,ซ้ายและขวา>2 เมตร,การผสมผสานแบบไร้รอยต่อ)
ฉัน3 มิติรอบ ๆ ดู
ฉัน4 ใน 1 Fisheye Images สําหรับ DVR
ฉันสายที่รองรับสแตติกหรือสายที่รองรับไดนามิคสําหรับจอดรถ
2) การแสดงภาพทิศทางที่แตกต่างกัน
ระบบสามารถแสดงภาพจากทิศทางต่าง ๆ

3) 3 มิติรอบหน้าจอ
ฉันแสดงภาพ 3 มิติรอบหน้า หลัง ซ้าย และขวา
ฉันดูการสลับตามการสลับเกียร์ การเปลี่ยนแปลงความเร็ว การทํางานของคนขับ ไซนอลการสลับ เป็นต้น
ฉันView สามารถหมุนใน 360°รอบรถ
ฉันรุ่นรถในวิดีโอจะเปลี่ยนทิศทางตามการขับขี่จริง

4) การเปลี่ยนภาพ
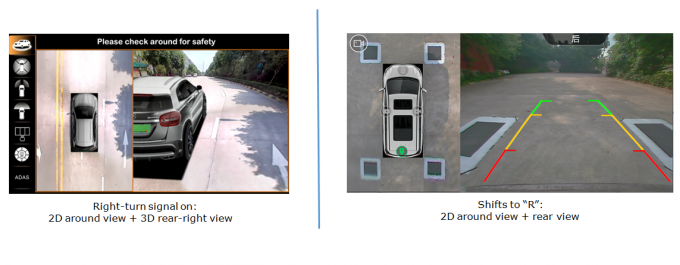
ระบบจะเปลี่ยนวิวที่แตกต่างกันไป ตามสัญญาณการหัน, การเปลี่ยนเกียร์ หรือปุ่ม AVM บนการควบคุมกลางของรถ
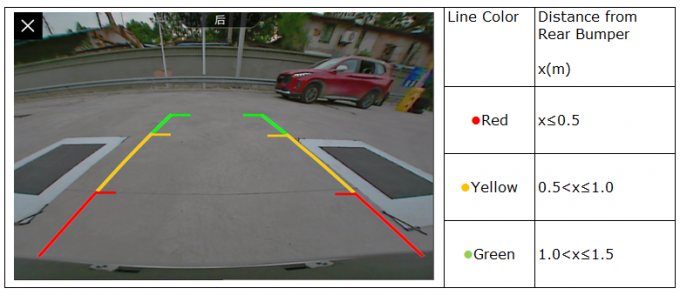
5) สายที่รองรับสแตติกหรือสายที่รองรับไดนามิกสําหรับการจอดรถ
เมื่อคนขับเปลี่ยนเกียร์เป็น "R" ระบบจะแสดงภาพ 2 มิติรอบ ๆ และภาพด้านหลังสายที่รองรับสแตตติกหรือสายที่รองรับไดนามิกจะแสดงให้เห็นเพื่อช่วยผู้ขับในการจอดรถหรือย้อนหลัง.
นอกเหนือจากหน้าที่พื้นฐาน ระบบ 360 AVM สามารถนําไปใช้กับADASเครื่องช่วยขับรถรวมถึง:
1) มุมมองพื้นที่เต็มภายใต้รถ (สิทธิบัตรเฉพาะของแคนดิเทค)
ฟังก์ชันนี้สามารถแสดงพื้นที่เต็ม เพื่อช่วยให้คนขับหลีกเลี่ยงถ้ําและหินขนาดใหญ่ล่วงหน้าเมื่อขับรถนอกถนน

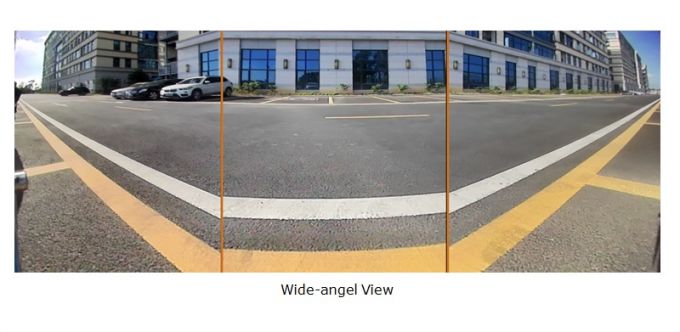
2) มุมใหญ่
ระบบสามารถแสดงภาพมุมกว้างใน tรูปแบบการแบ่ง, การดูทิศฟ้าปิด200°.
3) ระเบิดระยะไกลด้วยราดาร์ฉายเสียง
ระบบ AVM ไม่รวม ราดาร์ตลกกับราดาร์ หรือเราสามารถติดตั้งราดาร์ตามความต้องการของลูกค้า



4) ฟังก์ชัน DVR
ระบบ AVM สามารถเก็บวิดีโอจาก 4 กล้องและผลิตเป็นภาพ 4 ใน 1 สําหรับฟังก์ชัน DVR
การ์ดที่รองรับ: การ์ด TF, รูปแบบ FAT32, ขนาดสูงสุด 32GB

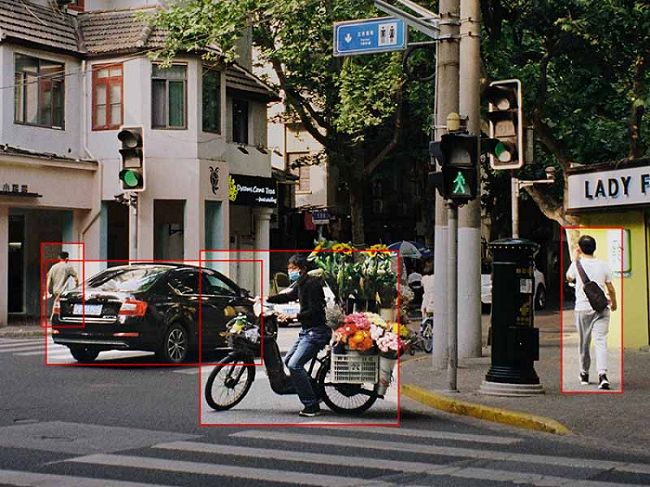
การตรวจจับวัตถุเคลื่อนที่ (MOD)
เมื่อจอดรถหรือรถเริ่มต้นเทคโนโลยีการจําหน่ายมังกร,รายการ360 Sระบบ VM สามารถค้นพบ วัตถุเคลื่อนที่รอบรถและเตือนผู้ขับรถเพื่อปรับพฤติกรรมขับรถ.
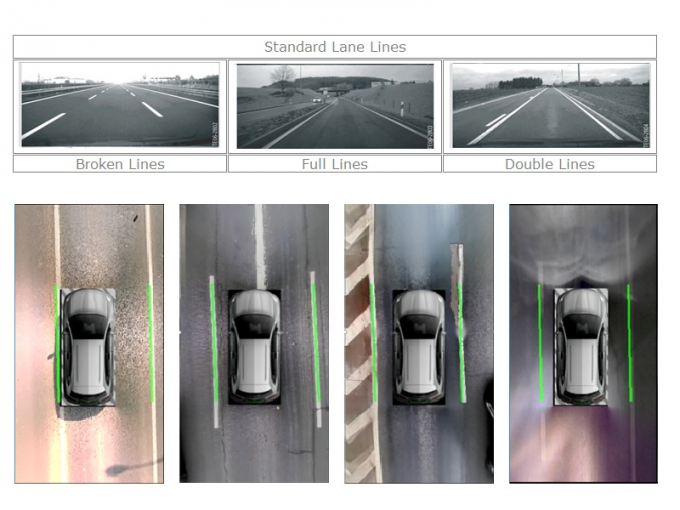
เลนDการเปิดWอาร์นิ่งSยีสเทม(LDWS)
เมื่อความเร็วของรถยนต์เร็วกว่า 50km/h (ความเร็ว)สามารถปรับแต่งได้), ระบบ AVM จะระบุเส้นทางสายมาตรฐานตามภาพรอบ 2 มิติ
ถ้าคนขับหันไปกรณีจากเส้นทางเดิม อ่อนสติly ((โดยไม่ใช้สัญญาณหัน), ระบบสามารถแจ้งเตือนได้ใน0.5 วินาทีก่อนการออกทางลาน เพื่อเตือนผู้ขับสําหรับการออกเส้นทางสถานการณ์ของรถยนต์, ให้เวลาตอบสนองมากขึ้นสําหรับผู้ขับรถ, ลดการชนที่เกิดจากการแยกทาง.
ความเห็น: ฟังก์ชันทั้งหมดข้างบนสามารถเลือกได้อย่างอิสระ, การสนับสนุนการปรับปรุงฟังก์ชันระบบ

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!